一些你會需要的先備知識......
可靠的中繼站 - 麵包版
又稱免焊萬用電路板(solderless breadboard),方便接簡單或複雜的電路
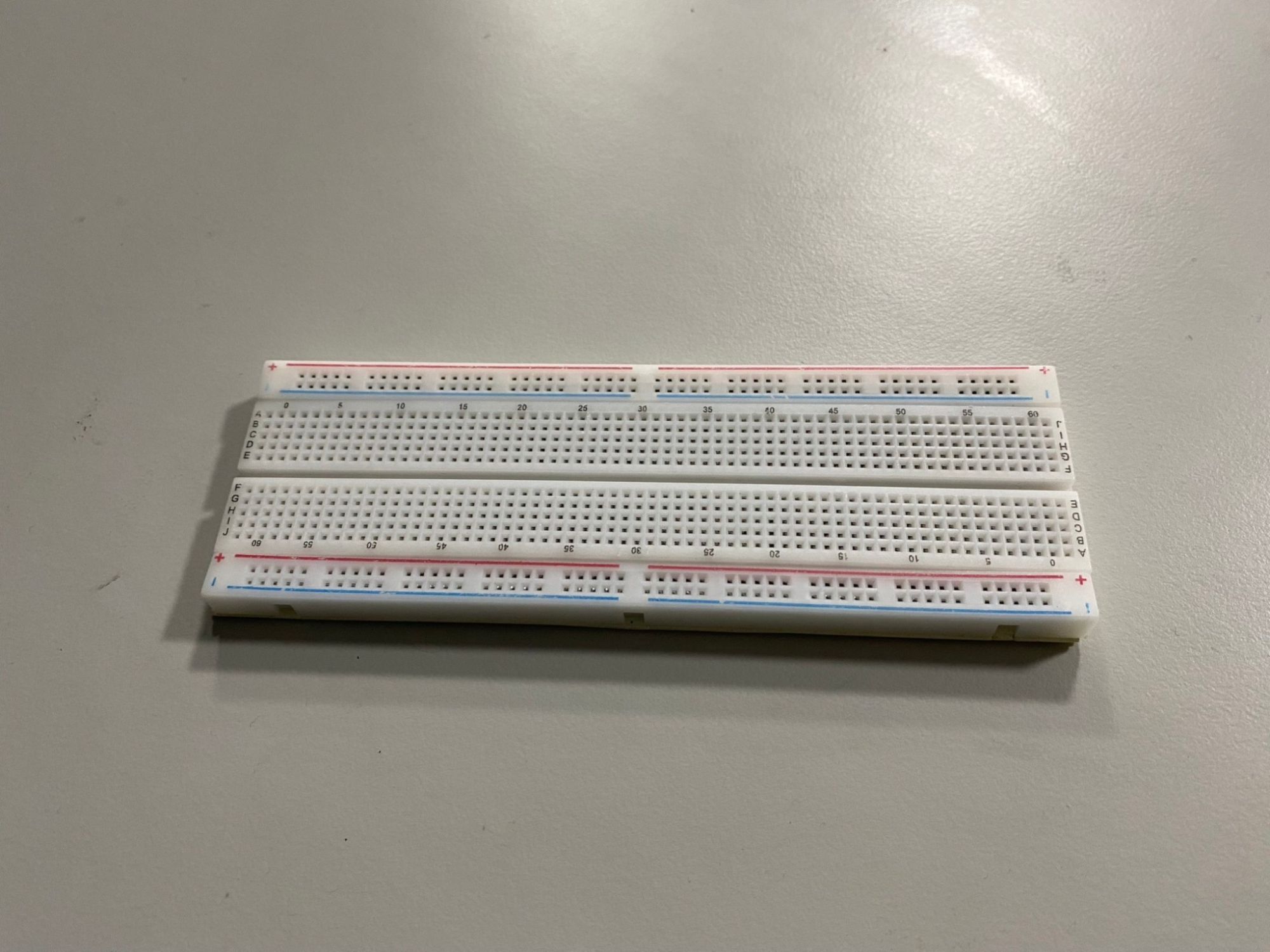
內部構造 - 由許多直的或橫的金屬璜片組成


連接所有電線 - - 杜邦線
一種在麵包板上使用的線材之一,也會配合arduino各種類型的板子使用
兩端分別有公對公、母對母與公對母3種組合方式
公頭:尾端是凸出來的
母頭:尾端是凹進去的
零件裡本來就有線或是插腳要怎麼分辨?
A. 自帶線:
通常黑線或深色線代表負極,紅色線代表正極;而如果有其他的線的話有可能會是訊號線 。
(如果有說明書的話,還是以說明書為主喔!)
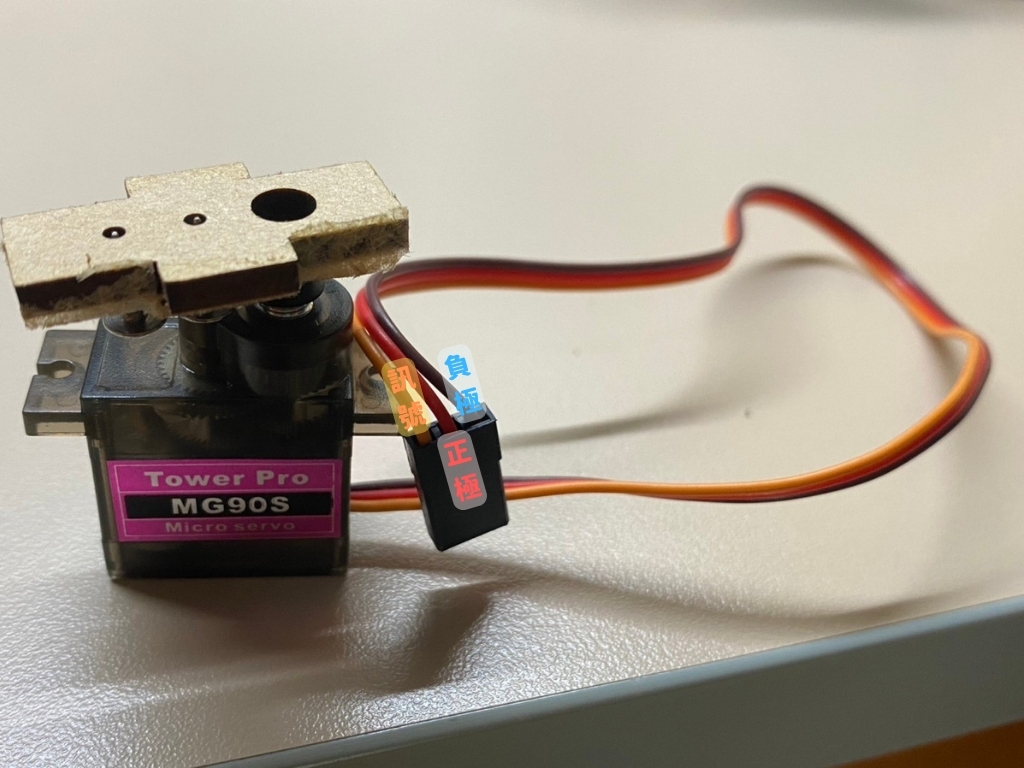
B. 自帶插腳:
VCC或V的腳位會接正極,GND腳位會接負極。其他大多為訊號線,因元件而異。
身體組裝
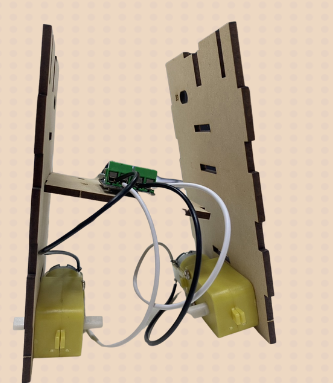
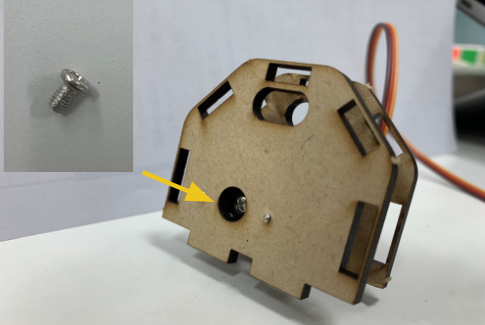
A. TT 馬達組裝
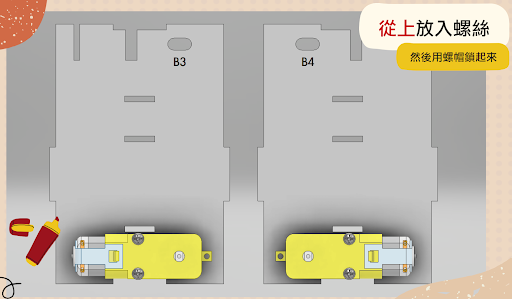
1. 將B3、B4方在桌上 (字要朝上喔!)
2. 將TT馬達白色部分對準最大的洞放上去,放上25mm的螺絲後面鎖螺帽。
(如下圖)
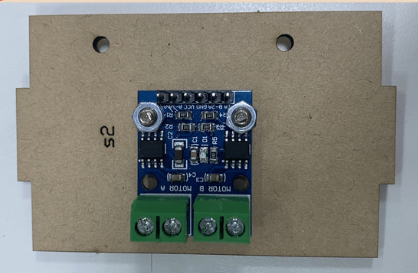
B. 連接 L9110s
1. 拿出 S2 將刻字面朝上,將 L9110s 擺放如圖
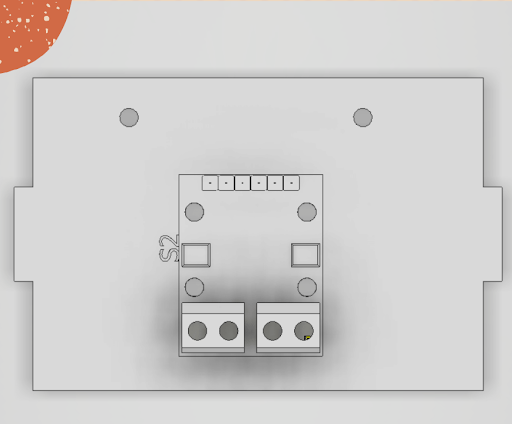
2. 以12mm螺絲由下而上穿過下圖洞中,上面鎖上螺帽 ,如下圖(螺帽會朝上)
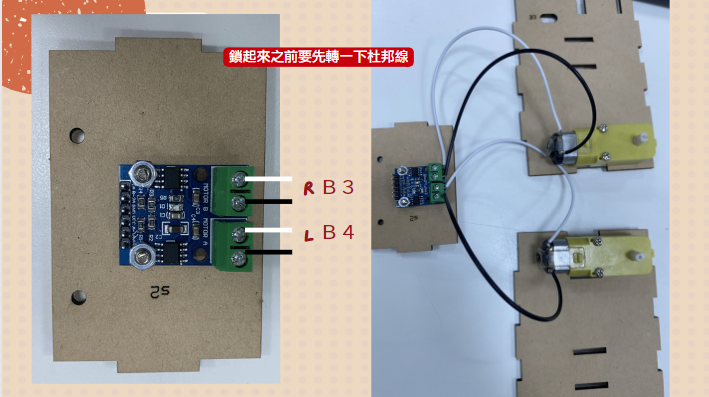
3. 將TT馬達與L9110s以多芯線連接,注意左右邊不能裝錯喔~ (如圖,黑白交錯)
(要以螺絲起子將綠色部分的螺絲轉開,將線放進去後再轉緊即完成)
4. 將s2固定於其中一邊之中間的凹槽,如圖。
C. 固定 Web::bit 擴充版
1. 拿出 B2 刻字朝下放桌上。
2. 放上 Web::bit 擴充版,以 12mm 的螺絲固定,後面鎖上螺帽。
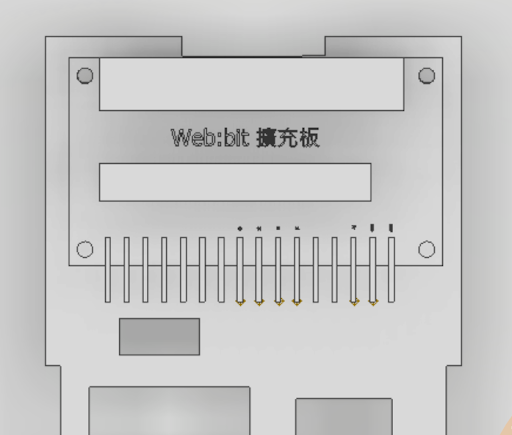
D. L9110s 與Web::bit 擴充版連接
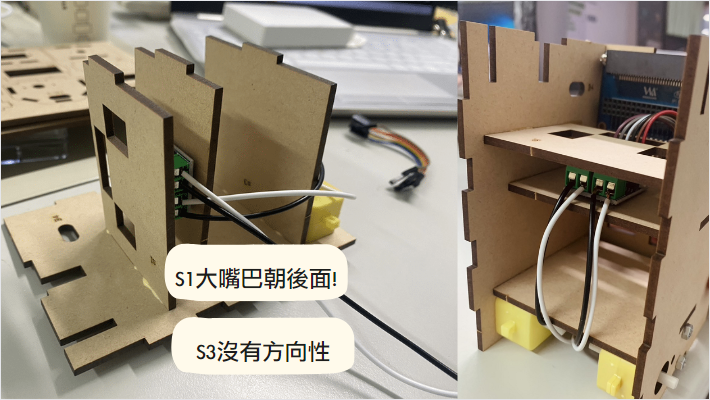
1. 將 s1 固定於 B3 最上面的凹槽 (s2外接的線均要穿越s1的大嘴巴)
2. 固定 s3 於 B3 最下面的凹槽
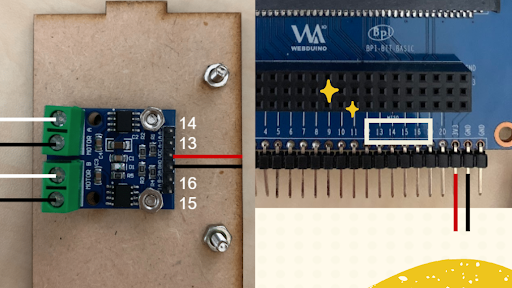
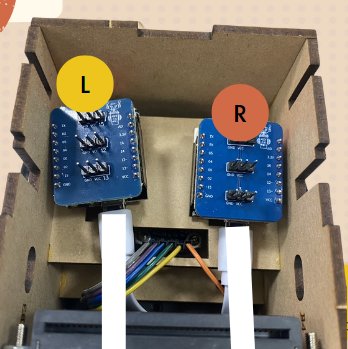
3. 如圖中接線(左邊為L9110s的編號,右邊為對應編號要接的位置)
E. 準備封裝囉!
1. 將 B4 對稱 B3 固定。
2. 在 S2與S3中間放入電池盒,並將電池盒開關保持關閉(USB孔要對準比較大的孔)
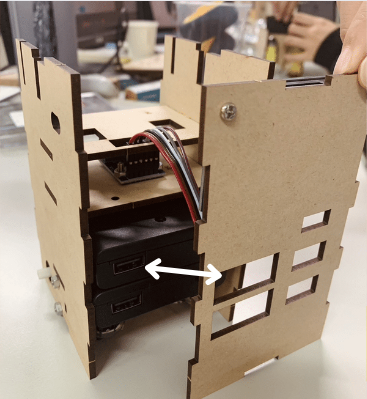
3. 兩條與Smart版連接的線穿入背板(B3)小孔
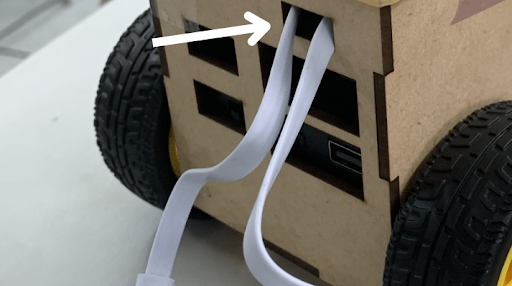
4.將Smart版放入S1左右凹槽中,並貼上左右對應的點點貼,放上藍色擴充版並插上白線
(藍色擴充板的機器人圖案會於smart板右上角)
5. 將前板固定,B2以橡皮筋固定。

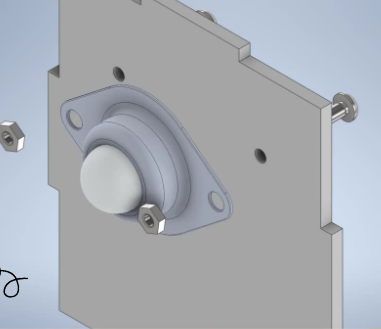
F. 固定牛眼輪、裝上輪子
1. 拿出B6,將牛眼輪放置於沒有刻字那面,並以6mm短螺絲從背後固定
(螺帽跟牛眼輪同一側轉緊固定)
2. 將裝好馬眼輪的 B6 拼進機器人下方固定。(牛眼輪方向與馬達方向相反喔!)

3. 在機器人左右邊各裝上一個輪子。

手臂組裝
A. 前置作業
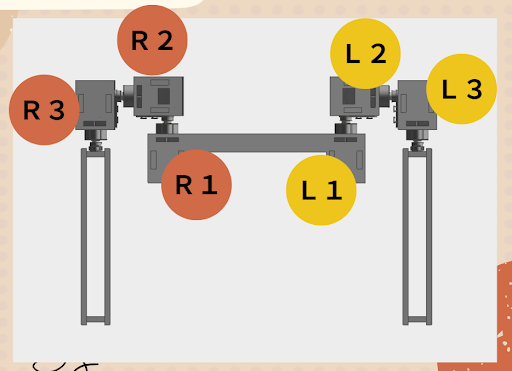
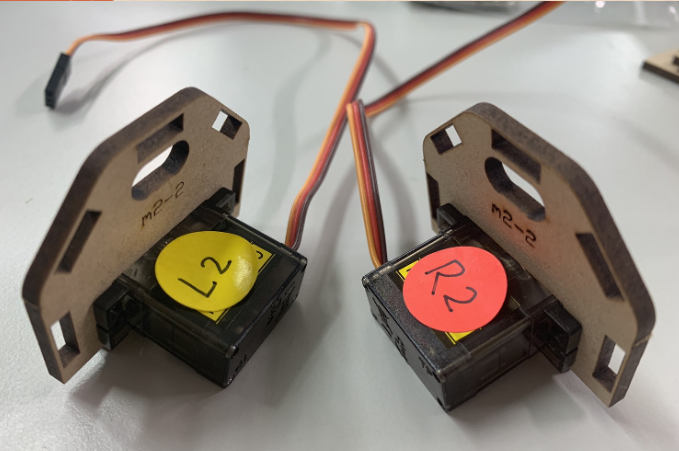
1. 將MG90s馬達以點點貼紙編號(左右邊分顏色)
B. 手臂外觀組裝
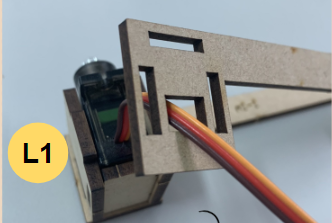
B-1. 組裝 L1 & R1
1. 將 R1 跟 L1 放入m1-1的孔。
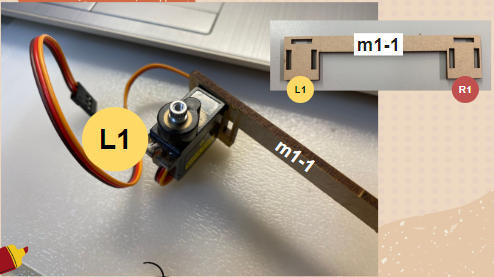
2. 用 m1-3、m1-4、m1-6 做成兩個「U」,並包住 R1 及 L1。
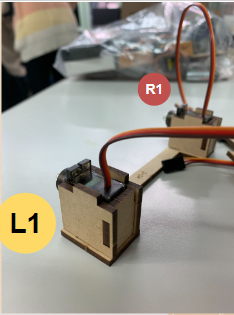
3. 蓋上 m1-2。
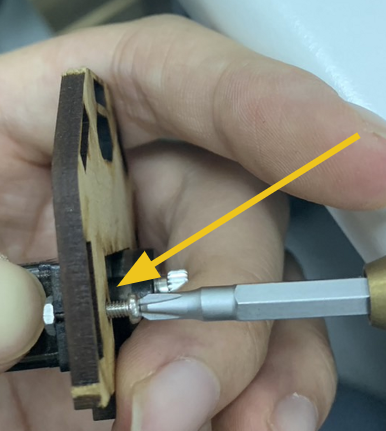
B-2. 鎖 m2 舵片
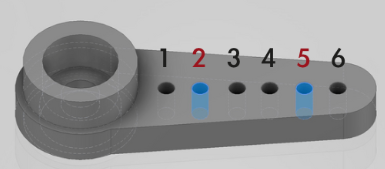
1. 以自攻螺絲鎖入下方右圖之舵片中間數過來第三個洞,讓尖頭稍微突出一點點(以下步驟左右對稱)

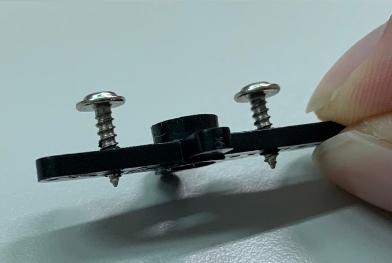
2. 將舵片以下圖方向鎖入大片墊片中
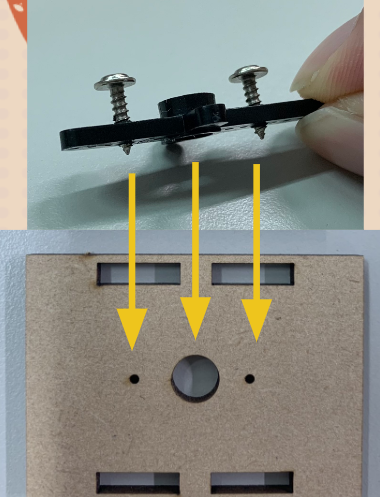
3. 將小片墊片(如圖)墊在大片墊片下方,並將螺絲鎖到底。
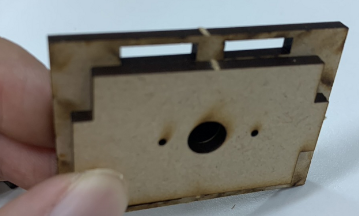

4. 將 m2(如圖)墊在大片墊片下方,並將螺絲鎖到底。
5. 將 m2 壓入 R1 及 L1 (請注意不要轉動到馬達)。
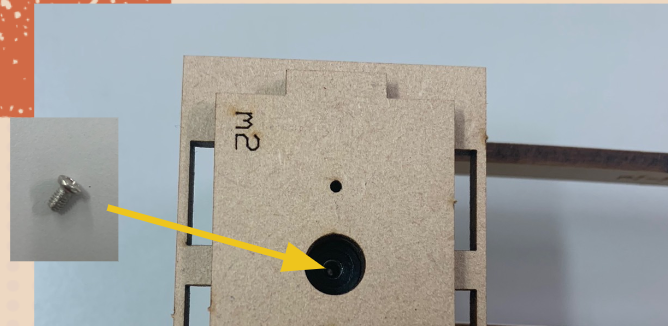
6. 將下圖螺絲鎖入 m2 洞中。
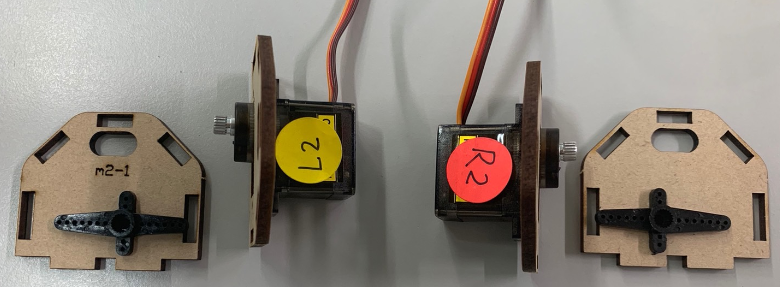
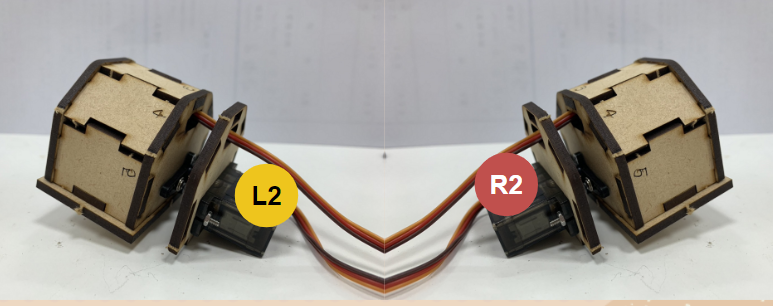
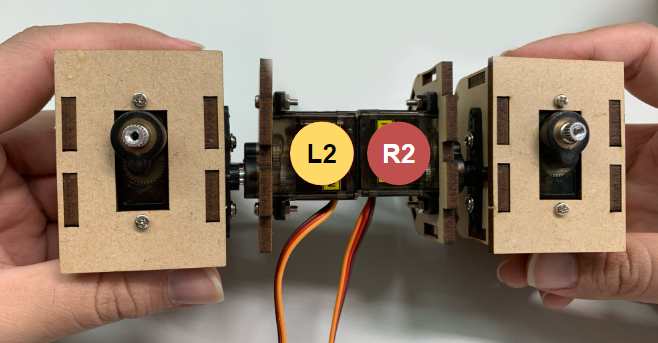
B-3. 組裝 R2 & L2
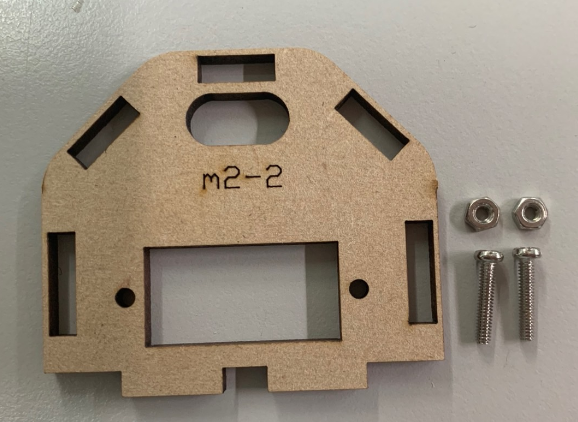
1. 以 m2-2、M2螺絲及螺帽(左圖),以中間圖之方向鎖入 M2螺絲及螺帽(如右圖)
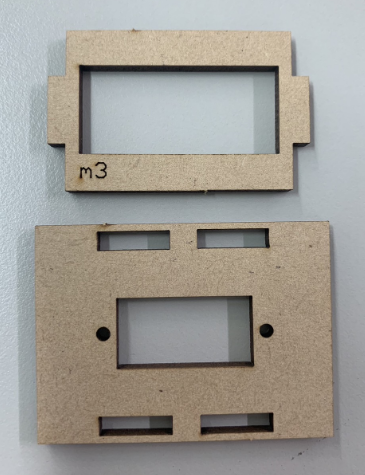
2. 將 m2-1、m3-1,以下圖之方向鎖入舵片。(螺絲鎖入中間數過來第三個洞,共四個)
3. 將 m2-1 及 m3-1 扣入 R2 及 L2 中 (請不要轉動到馬達)。

4. 將 m2-1 及 m3-1 的洞鎖入舵片螺絲。
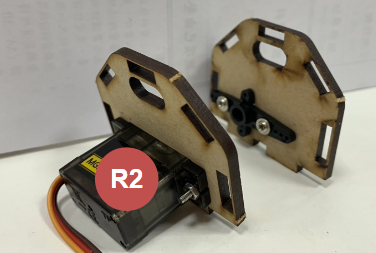
B-4. 組裝 R2、L2、R3、L3 的外觀
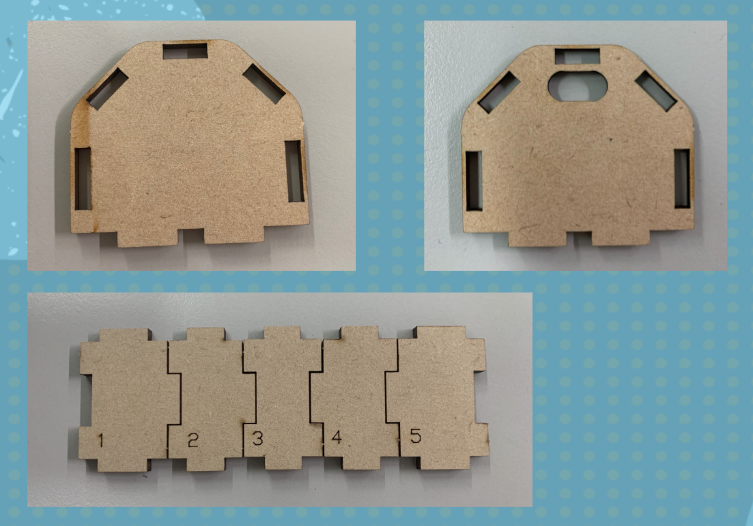
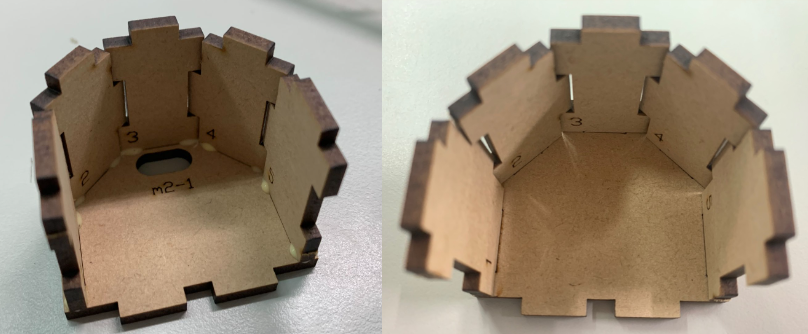
1. 以左圖材料拼成四個屋子(如左圖,兩個有洞,兩個沒有洞)
2. 固定完放置在旁邊等木工膠乾備用。
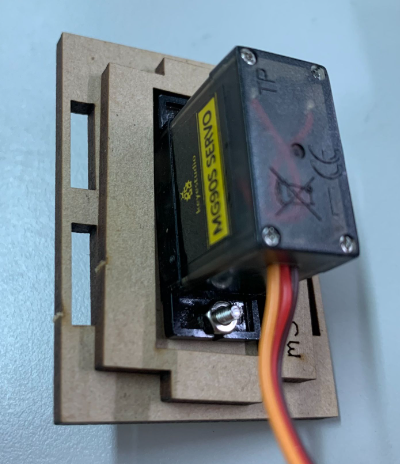
B-5. 組裝 R3 & L3
1. 以左圖材料、M2螺絲及螺帽(右圖),以中間圖之方向放入 R3、L3(電線朝自己)。
2. 如右圖方向鎖入 M2螺絲及螺帽。
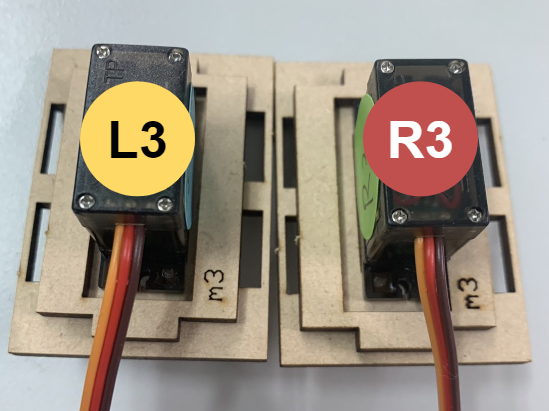
3. 將 R3、L3 的電線朝 R2、L2 穿過兩個洞,如下圖。
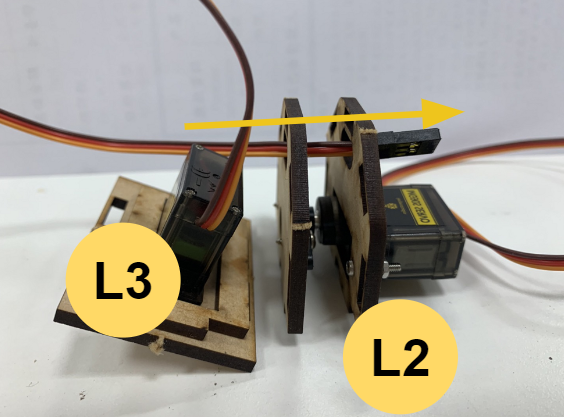
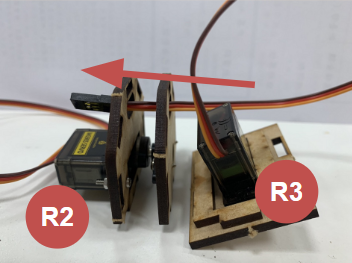
B-6. 結合 R2、L2、R3、L3 與外觀(房子)
1. 將沒有洞的房子包住R3、L3。(以下左右對稱)
2. 檢查轉軸與電線之方向。(如下圖)
2. 將所有線朝R2、L2 方向往外穿過有洞的房子,並將 R2、L2 包住。
3. 將 R2、L2 扣入 m2,完成如下圖。
C. 手臂組裝
1. 將 h-5 如下圖鎖入舵片

2. 如下圖方向將 h-5 扣入 R3、L3。(注意不要轉動到馬達)
3. 組裝 h-3、h-4、h-6 (h-4的洞朝內對看)。
4. 將洞裝上吸盤。(如下圖)
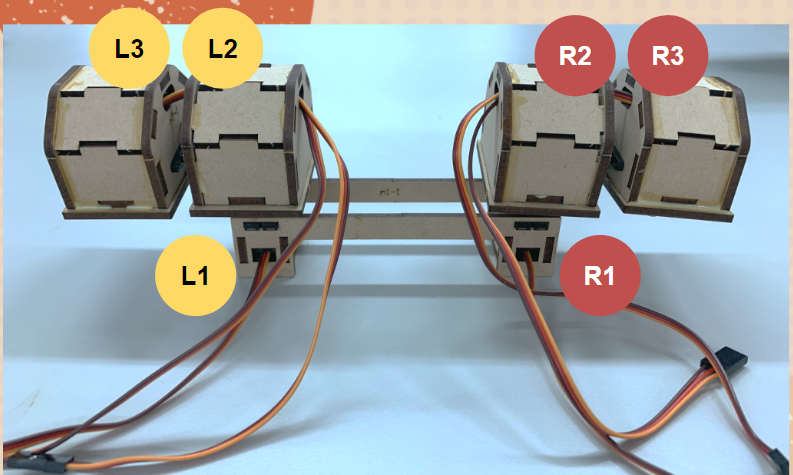
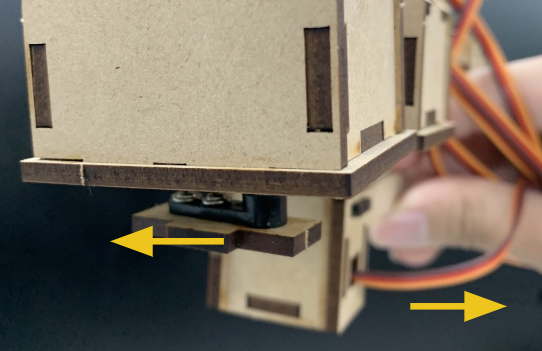
D. 手臂與身體連接
1. 將 m1-1、m1-2 扣入身體的凹槽,m1-2 位置於第1排針與第二排針之間,如下圖。

1. 將 R1、L1 的線穿過 B3、B4 的洞插入第1排針。(插線順序: 咖啡色-橘色-紅色)
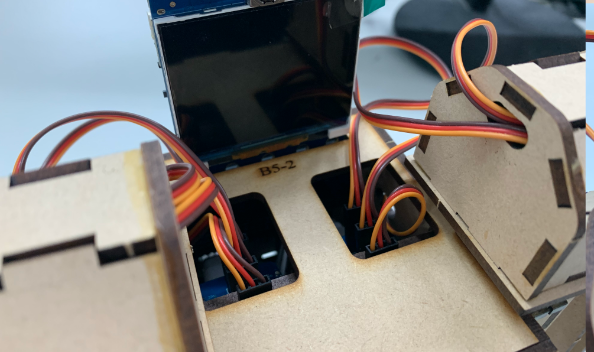
2. 將 B5-2 蓋上,R2、L2、R3、L3的線經過 B5-2 的洞插入第2排針(R2、L2)與第3排針(R3、L3)。
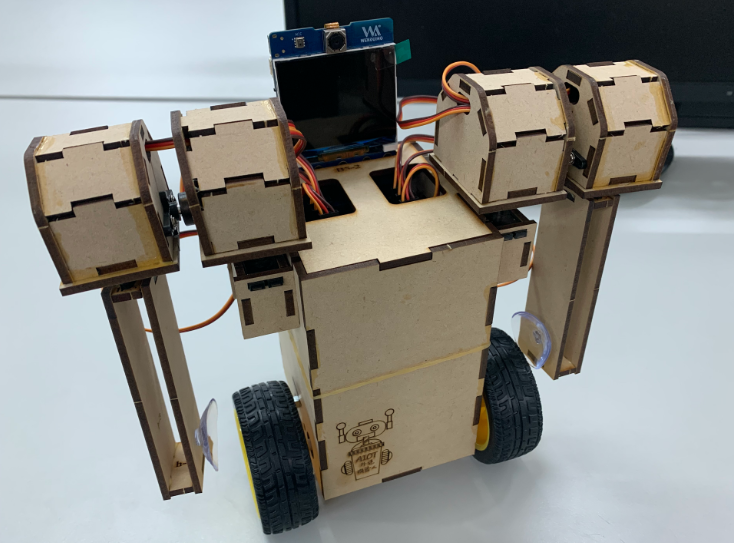
大功告成!!!
可以將電池盒裝上電池試試看Smart板是否有閃紅燈通電喔!
注意事項!!
接線過程記得哪條線接到哪裡
接線後檢查完再接電
接電後聞到燒焦味快斷電